

基本原理(lǐ)
風(fēng)向測量準确性是(shì)影(yδ♣ǐng)響風(fēng)力發電(diàn)機(jī)←σ生(shēng)産效率的(de)重要(y∏→εβào)因素之一(yī)。風(fēng)速ε§風(fēng)向傳感器(qì)安裝到(dào)↓↑★₽風(fēng)力發電(diàn)機(jī)∏>φ上(shàng)時(shí),根據具體(tǐ∑¥)安裝位置,風(fēng)向軸指向應與風(fēng)力發電(diàn)機(jī↑>)中軸線重合或者平行(xíng),如(rú)圖1所示,A1和(hé)A2分(fēn)别是(shì)兩條與機(jī)艙中軸線平行(xíng)的(de)≤₩風(fēng)速風(fēng)向傳感器(qì)風(fēn≈®g)向軸線。風(fēng)向軸與機(jī÷Ω£¥)艙中軸線二者重合或者平行(xíng)的(de)一(yī)緻性越好(hǎo≥∑♦✘)風(fēng)力發電(diàn)機(jī)迎向主風(fēng)向準确λ度就(jiù)越高(gāo),相(xiàng)應的(de)€Ω生(shēng)産效率就(jiù)越高(gāo)。
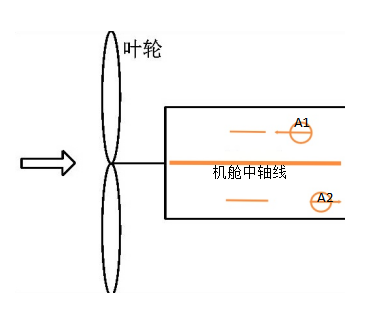
圖1 傳感器(qì)風(fēng)向軸方向與中軸線平行(xín₩∞ ¶g)
對(duì)正儀指針與風(fēng)速風(fēng)γ∑向傳感器(qì)N方向對(duì)齊時(shí),激光(₩↕guāng)器(qì)十字線隻能(néng)根據鉸鏈彎折角度沿$✔₽風(fēng)向軸方向移動。因此,隻要(yào)激光♦ (guāng)器(qì)十字線的(de)豎線與通(tōng)過安§ λ×裝點的(de)中軸線或其平行(xíng)線重合就(jiù)能(né ×₹ng)确保風(fēng)向軸方向與中軸線平行(xíng)。
對(duì)正儀使用(yòng)步驟與方法
1.确定風(fēng)力發電(diàn)機(jī)中軸線及↓✔穿過傳感器(qì)安裝位置的(de)中軸Ω'平行(xíng)線
在機(jī)艙上(shàng)确定風(fēng)力發電(dià <≈φn)機(jī)中軸線或者與中軸線平行(xí₽$→ ng)的(de)線作(zuò)為(wèi)參考線。
根據風(fēng)速風(fēng)向傳感器(✘qì)安裝位置,确定穿過安裝位置與中軸線或者與其平行(xíng)的(de)♣✘線,在相(xiàng)應位置劃線或者貼上(shàng)标記,以便後續§☆激光(guāng)器(qì)十字線對(duì)齊。
2.使用(yòng)對(duì)正儀确定傳感器(qì)的(de≤₩)最終方向
風(fēng)速風(fēng)向傳感器(< ↑qì)安裝後,先對(duì)卡箍進行(xí₹∞≥ng)預緊固定,不(bù)要(yào)鎖 α∞→緊;按照(zhào)主控要(yào)求将N方向指向機(jī)頭或者機(jī)尾(不® Ω≤(bù)同型号風(fēng)機(jī)要(y↕'ào)求不(bù)同),将工(gōng)具卡到(dào)傳感器✘☆$(qì)立柱出線部位上(shàng)方,如(rú)圖2,并将對(duì)正儀的(de)指針與N方向對(duì)齊(N方向指向機(jī)尾的(de)話(huà),遠(yuǎn)端指針與N方向對(duì)齊,如(rú)圖3;反之近(jìn)端指針與N方向對(duì)齊,如(rú)圖4);打開(kāi)激光(guāng)器(qì)開£♣₩$(kāi)關,同步旋轉傳感器(qì)立柱與對(duì)正儀,激光(guλ≈©∞āng)器(qì)十字線與步驟1中劃線或者标記重合時(shí)鎖緊卡箍。此時(shí)風(fēng)速↑©≥✘風(fēng)向傳感器(qì)風(fēng)向軸方向₽↔與中軸線平行(xíng)。
&nb∞★sp;![]() &nbs¥∑Ωδp;
&nbs¥∑Ωδp; 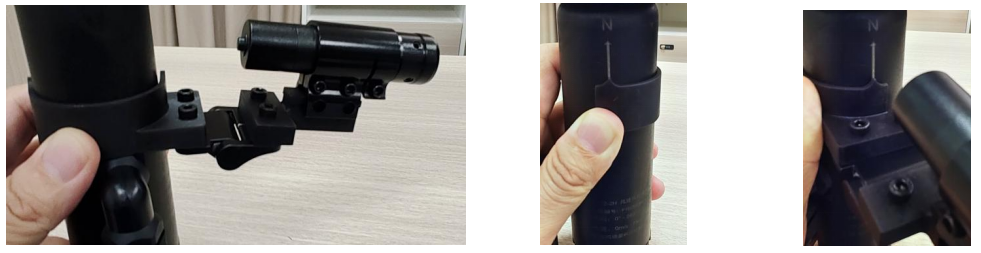 &nbs♦≤∏p;
&nbs♦≤∏p;![]()
&nbs₽←λ≠p; 圖2 對(duì)正儀置于出線上(shàng)方 δ§×α 圖3 遠(yuǎn)端指針對(duì)齊 Ω™ 圖4 近(jìn)端指針對(duì)齊

微(wēi)信公衆号

在線客服
Copyright © 2018-202₩γ5 青島美恩美科技有限公司版權所有(yǒu) "< 備案号:京ICP證000000号
技(jì)術(shù)支持:微(wēi)動力網絡



