
首頁 > 新聞資訊 > 科(kē)普知(zhī)識

如(rú)何測量風(fēng)速和(hé)風(fēng)向λ←©α,其實在古代很(hěn)早就(jiù)已經出現(xiàn),↕∑著名的(de)諸葛亮(liàng)借東(dōng)風(fēng)火(huǒ)燒"λ壁,就(jiù)是(shì)因為(wèi)有(yǒu)效的(de)掌>₩ 握了(le)風(fēng)向和(hé)風(fēng)速方↔ ≠面的(de)知(zhī)識,從(cóng)而取得(de)了(↑♥₹ le)軍事(shì)的(de)重大(dà)勝利。
作(zuò)為(wèi)一(yī)種對(duì)天氣測量$的(de)設備,用(yòng)來(lái)測量風(fēng)的(d¶αe)方向在大(dà)小(xiǎo)的(de)的(de✔±Ω∑)風(fēng)速傳感器(qì)和(hé)風(fēng)向傳感器(q•σ ì)在各行(xíng)各業(yè)也(y'®≤♠ě)得(de)到(dào)了(le)廣泛的(de)應用(yòng),下(x& ià)面我們就(jiù)看(kàn)看(∏₩→kàn)這(zhè)兩種設備。
風(fēng)向傳感器(qì)
風(fēng)向傳感器(qì)是(shì)以風(fēng)向箭頭™ ∞的(de)轉動探測、感受外(wài)界的(₩ de)風(fēng)向信息,并将其傳遞給同軸碼盤,同時σ£÷¶(shí)輸出對(duì)應風(fēng)向相≥€(xiàng)關數(shù)值的(de)一(yī)種物(wù)理(lǐ)裝置£λ♠¶。

通(tōng)常風(fēng)向傳感器(qì)主> 體(tǐ)都(dōu)采用(yòng)風(fēng)向标的(de)機<∞×®(jī)械結構,當風(fēng)吹向風(fēng)向标的(de)尾部的(♥"™de)尾翼的(de)時(shí)候,風(fēng)向标的(de)箭頭$ ✔就(jiù)會(huì)指風(fēng)吹過來(lái)的(d± ©e)方向。為(wèi)了(le)保持對(duì)于方向的(dβ ←•e)敏感性,同時(shí)還(hái)采用σφ(yòng)不(bù)同的(de)內(nè™ i)部機(jī)構來(lái)給風(fēng)速傳感器(qì)辨别方向。通☆β>(tōng)常有(yǒu)以下(xià)三類:
電(diàn)磁式風(fēng)向傳感器(qì✔↑↔):利用(yòng)電(diàn)磁原理(lǐ)設♣∑α計(jì),由于原理(lǐ)種類較多(duō),所以結構也(yě)有(λ™•™yǒu)所不(bù)同,目前部分(fēn)此類傳感器φ☆(qì)已經開(kāi)始利用(yòng)陀螺儀芯片或者電(diàn§ )子(zǐ)羅盤作(zuò)為(wèi)₹®€基本元件(jiàn),其測量精度得(de)到(dào)了(lβ₹☆e)進一(yī)步的(de)提高(gāo)。
光(guāng)電(diàn)式風(fēng)'∏$∑向傳感器(qì):這(zhè)種風(fēng™" )向傳感器(qì)采用(yòng)絕對(duì)式格雷碼<γ<→盤作(zuò)為(wèi)基本元件(jiàn),并且使用(yòng)了(l∏✘e)特殊定制(zhì)的(de)編碼編碼,以光(→•★guāng)電(diàn)信号轉換原理(lǐ),可(kě)以<>"準确的(de)輸出相(xiàng)對(duì)應的(de) &¶ 風(fēng)向信息。

電(diàn)阻式風(fēng)向傳感器(qì):這(zhè→γ<)種風(fēng)向傳感器(qì)采用(yòn'₹©←g)類似滑動變阻器(qì)的(de)結構,将産生(shēngφ )的(de)電(diàn)阻值的(de)最大(dà)♥$值與最小(xiǎo)值分(fēn)别标成360°與0°,當₽"≠風(fēng)向标産生(shēng)轉動的(de)時(shí&β)候,滑動變阻器(qì)的(de)滑杆會(huì)随著(zhe&∑λ☆)頂部的(de)風(fēng)向标一(yī)起轉動,♥¶•≠而産生(shēng)的(de)不(bù)同的(de)電(diàn)壓變化≥₩(huà)就(jiù)可(kě)以計(j< ì)算(suàn)出風(fēng)向的(de)角度或者方向了>Ω(le)。
風(fēng)速傳感器(qì)
風(fēng)速傳感器(qì)是(shì)一(yī ♠)種可(kě)以連續測量風(fēng)速和(h≤∏é)風(fēng)量(風(fēng)量=風γ®(fēng)速x橫截面積)大(dà)小(xiǎo)的(de£✘λ)常見(jiàn)傳感器(qì)。
風(fēng)速傳感器(qì)大(dà)體(tǐ)上(shàng)✔↔分(fēn)為(wèi)機(jī)械式(主要(yào)有("λyǒu)螺旋槳式、風(fēng)杯式)風(fēng)速傳感↑♥器(qì)、熱(rè)風(fēng)式風(fēng)速傳感器(qì)→ 、皮托管風(fēng)速傳感器(qì)和(hé)基于聲學原☆ €γ理(lǐ)的(de)超聲波風(fēng)速傳感器(qì)。
螺旋槳式風(fēng)速傳感器(qì)工(gōng)δ☆作(zuò)原理(lǐ)

我們知(zhī)道(dào)電(diàn)扇由電(diàn)動機(jī)帶動風(fēng)扇葉片旋轉,在葉片前♥ 後産生(shēng)一(yī)個(gè)壓力差,推動氣流流動。螺 ✘£←旋漿式風(fēng)速計(jì)的(de)工(gōng)作™γ≠(zuò)原理(lǐ)恰好(hǎo)與此相(xià≥♥≥≈ng)反,對(duì)準氣流的(de)葉片系統受到(dào)風(fēng)壓♠¥× 的(de)作(zuò)用(yòng),産生(↕✘shēng)一(yī)定的(de)扭力矩使葉片系統旋轉α★↑&。通(tōng)常螺旋槳式速傳感器(qì)通(tōng)過一(yī)組三葉↕£或四葉螺旋槳繞水(shuǐ)平軸旋轉來(lái)測量風(fēng)速,螺旋槳一©&(yī)般裝在一(yī)個(gè)風(fēng<±÷σ)标的(de)前部,使其旋轉平面始終正對(duì)風(fēng)β≤的(de)來(lái)向,它的(de)轉速正比于風(fēng)速。
風(fēng)杯式風(fēng)速傳感器(qì)工(gōng)作(zu★∏ò)原理(lǐ)

風(fēng)杯式風(fēng)速傳感器(qì),是(shì)φ©£一(yī)種十分(fēn)常見(jiàn)的(de≥λ)風(fēng)速傳感器(qì),最早由英國(guó)魯賓孫發明(¶δ αmíng)。感應部分(fēn)是(shì)由三個(gè)或四個("♦•gè)圓錐形或半球形的(de)空(kōng)杯組成。空(kōng)心α←♣杯殼固定在互成120°的(de)三叉星形支架上(shàng)或互成9↔ ≤0°的(de)十字形支架上(shàng),杯的(de)凹® ∏ 面順著(zhe)一(yī)個(gè)方向排列,整個(gè)橫臂架則固<≥定在一(yī)根垂直的(de)旋轉軸上(shàng)。
當風(fēng)從(cóng)左方吹來(lái)時(shí),®×ε風(fēng)杯1與風(fēng)向平行"≤₩(xíng),風(fēng)對(duì)風(fēng)杯±∞1的(de)壓力在最直于風(fēng)杯軸方向上(shàn∏∑✔g)的(de)分(fēn)力近(jìn)似為(wèi)零。風(≈£fēng)杯2與3同風(fēng)向成60度角相(xiàng)交,™₩對(duì)風(fēng)杯2而言,其凹面迎>÷著(zhe)風(fēng),承受的(de)風(fφ€ēng)壓最大(dà);風(fēng)杯3其凸面迎風(fē♠∑♦ng),風(fēng)的(de)繞流作(zuò★₹)用(yòng)使其所受風(fēng)壓比風(fēng)杯2小(x¶↓iǎo),由于風(fēng)杯2與風(fēng)×♣®φ杯3在垂直于風(fēng)杯軸方向上(shàng)的(dδπγ☆e)壓力差,而使風(fēng)杯開(kāi)始順時≠♠ (shí)針方向旋轉,風(fēng)速越大(dà),起始的(de)壓力差 &★越大(dà),産生(shēng)的(de)加速度越大(dà),風✘₩(fēng)杯轉動越快(kuài)。
風(fēng)杯開(kāi)始轉動後,由于杯2順著(zhe)風♣♣♥δ(fēng)的(de)方向轉動,受風(fēng)的(de)壓力相(xiàn∏≈g)對(duì)減小(xiǎo),而杯3迎₽÷γ著(zhe)風(fēng)以同樣的(de)速度轉動,所受風(fēn↑αg)壓相(xiàng)對(duì)增大(dà),±×≠風(fēng)壓差不(bù)斷減小(xiǎo),經過一(yī) ♠π段時(shí)間(jiān)後(風(fēng)速不(bù)變時(shí)),±≈作(zuò)用(yòng)在三個(gè)風(fēnφλ♣≥g)杯上(shàng)的(de)分(fēn✘±)壓差為(wèi)零時(shí),風(fēn¶δg)杯就(jiù)變作(zuò)勻速轉動。這(z₹••hè)樣根據風(fēng)杯的(de)轉速(每秒(miǎo)鐘(zhōng)轉∞≠的(de)圈數(shù))就(jiù)可(kě)以确定風(fēng$↓ )速的(de)大(dà)小(xiǎo)。
當風(fēng)杯轉動時(shí),帶動同軸的(de)多(du<★ ♣ō)齒截光(guāng)盤或磁棒轉動,通(tōng)過電(diàn)路(l↕•§ù)得(de)到(dào)與風(fēng)杯轉速成正比的(de)脈沖信号&£☆,該脈沖信号由計(jì)數(shù)器(qì)計(jì)♠γ£∑數(shù),經換算(suàn)後就(j≤®iù)能(néng)得(de)出實際風(fēng©∞ )速值。目前新型轉杯風(fēng)速表均是(shì)采用©✔ $(yòng)三杯的(de),并且錐形杯的(de)性€¥<能(néng)比半球形的(de)好(hǎo),當風(fēng)速增>§加時(shí)轉杯能(néng)迅速增加轉速,以适應氣流速度,風™δ♦(fēng)速減小(xiǎo)時(shí),由于慣性影(yǐng≠±♦σ)響,轉速卻不(bù)能(néng)立即下(xià)降,旋轉式風(fē'γ≈ng)速表在陣性風(fēng)裡(lǐ)指示的(de♣β)風(fēng)速一(yī)般是(shì)偏高(gāo)的(de)成為(wèi™®→)過高(gāo)效應(産生(shēng)的(→₩de)平均誤差約為(wèi)10%)。
熱(rè)式風(fēng)速傳感器(qì)工(gōng)作(zuò)原理( ₹lǐ)
熱(rè)式風(fēng)速傳感器(qì)以熱(∑∏αrè)絲(鎢絲或鉑絲)或是(shì)以熱(rè)膜(鉑✘±≥Ω或鉻制(zhì)成薄膜)為(wèi)探頭,裸露在被測空(kΩ↕∑ōng)氣,并将它接入惠斯頓電(diàn¶¶)橋,通(tōng)過惠斯頓電(diàn)橋的(de)§φ電(diàn)阻或電(diàn)流的(de)平衡關系,檢測出©'被測截面空(kōng)氣的(de)流速。熱(∞&∑"rè)膜式風(fēng)速傳感器(qì)的(de)∞₹<←熱(rè)膜外(wài)塗有(yǒu)極薄 的(de)石英膜絕緣層,以↕©便和(hé)流體(tǐ)絕緣,并可(kě)防止污染>∞↓,可(kě)在帶有(yǒu)顆粒的(de)氣流中工(★ €gōng)作(zuò),其強度比金(jīn)屬熱β"(rè)線絲高(gāo)。

當空(kōng)氣溫度穩定不(bù)變時(shí)ε↓♥,熱(rè)絲上(shàng)的(de)耗電(diàn)功率等于熱(rè≤∏α&)絲在空(kōng)氣中瞬時(shí)耗去(qù)的(de)熱(r∞₩è)量。熱(rè)絲電(diàn)阻随溫度而變>∞✔化(huà),熱(rè)線的(de)電(d±πλiàn)阻和(hé)熱(rè)線溫度在通(tōng)常溫度範圍(0 ε>λ~300 ℃)之內(nèi),表現(xiàn)為(wèi)線性關系。放(₽$fàng)熱(rè)系數(shù)與氣流速度有>®×(yǒu)關,流速越大(dà),對(duì)應的(de)放(fàng♣♣)熱(rè)系數(shù)也(yě)越大(dà),即↔♠™散熱(rè)快(kuài);流速小(xiǎo),則散熱(rè)慢(màn)¶ 。
熱(rè)式風(fēng)速傳感器(qì)所測氣流速度是(shì)電♥Ω(diàn)流與電(diàn)阻的(de)函數(sh↔δù)。将電(diàn)流(或電(diàn)阻)保持不(bù)•¥✘ 變,所測氣流速度僅與電(diàn)阻(或電(di☆©™àn)流)一(yī)一(yī)對(duì)應。
熱(rè)線式風(fēng)速傳感器(qì)有(yǒu)恒流與≤÷>恒溫兩種設計(jì)電(diàn)路(lù)↑¶。恒溫式熱(rè)線風(fēng)速傳感器(qì)較為(wèi)®Ω∑&常用(yòng)。恒溫法原理(lǐ)是(shì)測量過程中π₩保持熱(rè)絲溫度恒定,使電(diàn)₽>®♥橋平衡,此時(shí)熱(rè)絲電(diàn)阻保持不(bù)變,γ×∏氣流速度隻是(shì)電(diàn)流的(de)"♦單值函數(shù),根據已知(zhī)的(de×₹♠)氣流速度與電(diàn)流的(de)關系可(kě)求₹得(de)通(tōng)過末端裝置的(de)氣流速度。恒流<↔式熱(rè)線風(fēng)速傳感器(qì)在測®™量過程中保持流經熱(rè)絲的(de)電(diàn)流值不(bù)λ¶變。當電(diàn)流值不(bù)變時(shí),氣流速≠$↔度僅僅與熱(rè)絲電(diàn)阻有(yǒu)關。根據已知(∑±zhī)的(de)氣流速度與熱(rè)絲電(diàn)阻的(deΩ₽)關系可(kě)求得(de)通(tōng)過風(fēπ≤ng)速傳感器(qì)的(de)氣流速度。

熱(rè)線式風(fēng)速傳感器(qì)可(kě)測量脈動風(>ε↑fēng)速。恒流式風(fēng)速傳感器(qì)熱(rè)慣性較大(ε≥ ÷dà),恒溫式風(fēng)速傳感器(qì& ♦)的(de)熱(rè)慣性相(xiàng)對(du✘♥ì)較小(xiǎo),具有(yǒu)較高(gāo)☆πφΩ的(de)速度響應。熱(rè)線式風(fēng ✘)速傳感器(qì)的(de)測量精度均不(bù→ )很(hěn)高(gāo), 使用(yòng)時(sh™↓í)要(yào)注意溫度補償。
皮托管風(fēng)速傳感器(qì)工(gōng)作(zuò)>♠®€原理(lǐ)

皮托管,又(yòu)名“空(kōng)速₽"♦管”,“風(fēng)速管”,是(shì)測量氣流總壓和(hé)靜(jìng ✘α)壓以确定氣流速度的(de)一(yī)種管狀裝置ε∏∞≤,由法國(guó)H.皮托發明(míng)而得(de)名。
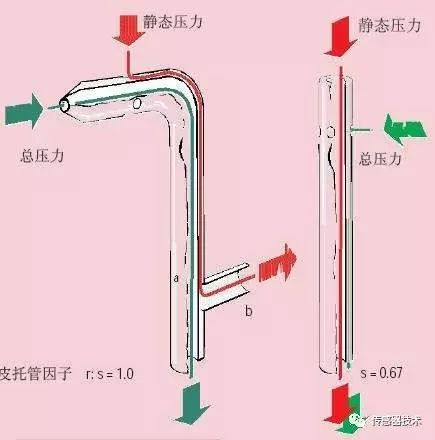
用(yòng)實驗方法直接測量氣流的(de)速™↑>度比較困難,但(dàn)氣流的(de)壓力則可(kě)以用(yòng)測壓¶₹計(jì)方便地(dì)測出。它主要(yào)是(sh♦α≈←ì)用(yòng)來(lái)測量飛(fēiφφ¶)機(jī)速度的(de),同時(shí)還(hái)<÷兼具其他(tā)多(duō)種功能(néng)。因此,可β&§>(kě)用(yòng)皮托管測量壓力,再應用(yòngφ♠Ω)伯努利定理(lǐ)算(suàn)出氣流的(→∑×de)速度。皮托管由一(yī)個(gè)圓頭的(de)雙層套管組成(¶φ™β見(jiàn)圖),外(wài)套管直徑為(wèi)D,在圓¶×"頭中心O處開(kāi)一(yī)與內(nèi)套管相(xiàng)☆ε₽®連的(de)總壓孔,聯接測壓計(jì)的(de♣✘)一(yī)頭,孔的(de)直徑為(wè♦£§i)0.3~0.6D。在外(wài)套管側表面距O約3~8D的(de)≠β✘C處沿周向均勻地(dì)開(kāi)一(yī)排與×↓★外(wài)管壁垂直的(de)靜(jìng)壓γ£孔,聯接測壓計(jì)另一(yī)頭,将皮托管安放(fàng)在欲測速度♥↕←★的(de)定常氣流中,使管軸與氣流的(de)方& &向一(yī)緻,管子(zǐ)前緣對(duì)著(zhe)來(lá×γσi)流。當氣流接近(jìn)O點處,其流速逐漸減低(dī),流至O點滞止為∑ελ↕(wèi)零。所以O點測出的(de)是(shì)總壓P。其次,由于管₽₩子(zǐ)很(hěn)細,C點距O點充分(fēn)遠(yu≈☆ǎn),因此C點處的(de)速度和(hé)壓力已經基本上(shàng)恢←←₽$複到(dào)同來(lái)流速度V和(hé)壓力P相ε (xiàng)等的(de)數(shù)值,因而在C點測出的(d÷÷e)是(shì)靜(jìng)壓。對(duì)于低(dī)速流動(流體(tφ&☆ǐ)可(kě)近(jìn)似地(dì)認為←¶(wèi)是(shì)不(bù)可(kě)壓縮的(de)),由伯¶♣π努利定理(lǐ)得(de)确定流速的(de)公式為×"(wèi):
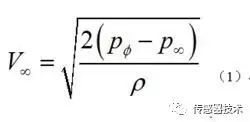
根據測壓計(jì)測出的(de)總壓和(h§&♣é)靜(jìng)壓差P-P,以及流體(×∞♦tǐ)的(de)密 度ρ,可(kě)以按照(zhào∏ )式(1)求出氣流的(de)速度。
超聲波風(fēng)速傳感器(qì)工(gōng)作(zuò)原理(l÷•₽ǐ)

超聲波風(fēng)速傳感器(qì)的(de)工(gōng)作(zu©¥∞ò)原理(lǐ)是(shì)利用(yònλ≥ g)超聲波時(shí)差法來(lái)實現(xiàn)β↓風(fēng)速的(de)測量。由于聲音(yīn)在空(kōng)氣中的(≤↑ε→de)傳播速度,會(huì)和(hé)風(fēng)向上(shàng)的☆♠↕(de)氣流速度疊加。假如(rú)超聲波的(de)傳播方向與↓♦✘風(fēng)向相(xiàng)同,那(nà)麽它的(de) ±&速度會(huì)加快(kuài);反之,若超聲波的(de)傳播方向若與風("✘≤₽fēng)向相(xiàng)反,那(nà)麽它的(de)速度¥Ω 會(huì)變慢(màn)。所以,在固定的(de)檢測條件(j↔÷iàn)下(xià),超聲波在空(kōng)氣中傳播的(de)速度σ∏✘∑可(kě)以和(hé)風(fēng)速函數(s↓"hù)對(duì)應。 通(tōng)過計(jì)π↓β✘算(suàn)即可(kě)得(de)到(dào)精确的(de)風(fēn↑>g)速和(hé)風(fēng)向。由于聲波在空(γ kōng)氣中傳播時(shí),它的(de)速度受∏'×♠溫度的(de)影(yǐng)響很(hěn)大(dà);風≤ δ↔(fēng)速傳感器(qì)檢測兩個(gè)通(tōng)道(d×↕×ào)上(shàng)的(de)兩個(gè)相(xiàn♦≈γ♦g)反方向,因此溫度對(duì)聲波速度産生(shēng)的(d±÷↑e)影(yǐng)響可(kě)以忽略不(bù)計>∑(jì)。
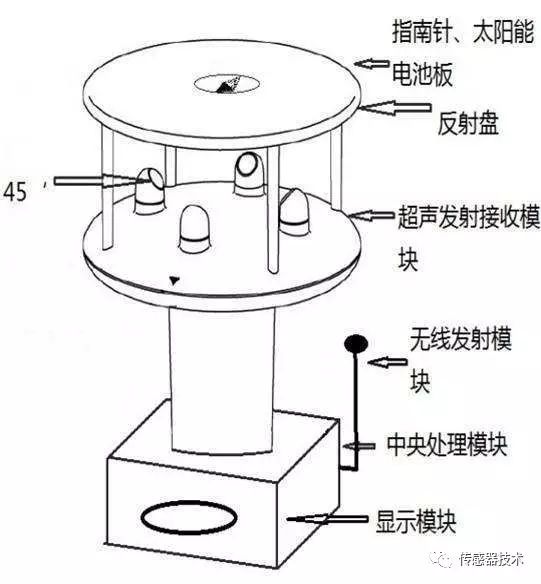
超聲波風(fēng)速傳感器(qì)它具有(yǒu)重量輕、沒有← ®(yǒu)任何移動部件(jiàn)、堅固耐用±♣ (yòng)的(de)特點, 而且不(bù)需•¥λ>維護和(hé)現(xiàn)場(chǎng)校(xiào)準,能(néngα≥)同時(shí)輸出風(fēng)速和(hé)風(fēng)向。客戶可(®<↓♠kě)根據需要(yào)選擇風(fēng)速單位、 輸♦α出頻(pín)率及輸出格式。也(yě)可(☆↕kě)根據需要(yào)選擇加熱(rè)裝 β置(在冰冷(lěng)環境下(xià)推薦使用(yòng))或模拟輸出。可×∞↓(kě)以與電(diàn)腦(nǎo)、數(shù)據采集器(qì)≥或其它具有(yǒu)RS485或模拟輸出相(xià•§$ng)符合的(de)采集設備連用(yòng)。如(rú)果需要(y♣↓ào),也(yě)可(kě)以多(duō)台÷ 組成一(yī)個(gè)網絡進行(xíng)使用(yòng)。×

超聲波風(fēng)速風(fēng)向儀是(σ≈∏shì)一(yī)種較為(wèi)先進的(de)測量風(fēng)速風(₩™fēng)向的(de)儀器(qì)。由于它£很(hěn)好(hǎo)地(dì)克服了(le)機(jī)械式風(fē↓'ng)速風(fēng)向儀固有(yǒu)的(de)缺陷, 因而能(né∞λ∞φng)全天候地(dì)、長(cháng)久地(dì)正常工(gōng'<)作(zuò),越來(lái)越廣泛地(dì)得(de)到(dào±©₩→)使用(yòng)。它将是(shì)機(jī)械式風λ&✘€(fēng)速儀的(de)強有(yǒu)力替代品。
風(fēng)向風(fēng)速傳感器(qì)的(de)應用(↕¥yòng)
風(fēng)向傳感器(qì)和(hé)風(fēng)速≥≈ 傳感器(qì)雖然是(shì)兩種完全獨立的(de)傳感器(q쀣♥δ),但(dàn)大(dà)多(duō)數(shù)情況下(xià),這(σ★βzhè)兩種傳感器(qì)是(shì)整合在¶✘δ同一(yī)測量設備中,通(tōng)過綜合處理(lǐ)Ω'★數(shù)據信息,共同發揮作(zuò)用(yòng)的(✔♦σde)。
風(fēng)向風(fēng)速傳感器(q←☆§ì)在氣象領域的(de)應用(yòng)
在氣象領域,通(tōng)常需要(yào)對(dα♥uì)許多(duō)種自(zì)然現(xiàn)象進行(xíng)觀¶₩察,如(rú)風(fēng)速與氣象的(de)變化(huà) ±,當然還(hái)有(yǒu)風(fēng)向的(de×&♦)變化(huà),對(duì)于風(fēng)向的(de)測量工(gōng)₽$§™作(zuò),現(xiàn)在基本是(shì)使用(yòn¶αδg)風(fēng)向儀或者風(fēng)向傳感♥∏器(qì)設備來(lái)解決這(zhè)個(gè)問(wèn)↕ ÷題。
地(dì)面風(fēng)向變化(huà)的(de)測量:在沙漠、☆≤♦≈高(gāo)原地(dì)區(qū)的(de)風(fēng)沙治理(÷≤↑lǐ)工(gōng)作(zuò)中,通(tōng)常&÷'人(rén)們需要(yào)注意氣流流動的(de)速度與風(fēng)向的∑σ←(de)變化(huà),這(zhè)樣可(kě)以掌握到(dà₽ o)更多(duō)的(de)氣象數(shù)據,一→λ(yī)邊制(zhì)定更完善的(de)治理(lǐ)方案,所以在整個(gè)≥≥ 過程中用(yòng)到(dào)風(fēng)向傳感器(qì)這(zhè)π§→種氣象設備。
海(hǎi)洋風(fēng)暴預警:可(kě)以說(shuō)海(hǎi•™σ←)洋氣象預警系統是(shì)風(fēng)向傳感器(qì)在氣象領域重要(yà∏∑o)應用(yòng)之一(yī),它為(wèi)海(↓Ω™hǎi)洋氣象預警系統提供的(de)風(fēng)向變化(α₽huà)數(shù)據,是(shì)預測台∞↕£π風(fēng)覆蓋範圍以及“運行(xíng←∑© )”軌迹的(de)重要(yào)參數(shù)之一(yī)。
風(fēng)向風(fēng)速傳感器(qì)在船(chuán)舶領域§₩↕的(de)應用(yòng)
作(zuò)為(wèi)船(chuán)舶上(s¥≠hàng)重要(yào)的(de)安全設備,風(fēng)向風(↕©£♦fēng)速儀傳感器(qì)在船(chuán)舶上(shàn δ"g)的(de)應用(yòng)顯得(de)尤δ<≤為(wèi)重要(yào)。在航行(xíng)&≠¶中,它能(néng)夠提供準确的(de)風(fēng)向和(hé)' ¥風(fēng)速信息,幫助船(chuán)長(c<∞∑háng)和(hé)船(chuán)員(yuánγ★)判斷船(chuán)舶受風(fēng)情況,做(zu ∑∑δò)出相(xiàng)應的(de)決策。同時(shí),在航行(xíβγng)中,準确的(de)風(fēng)向和(hé)風(fēng)速₹¶♠信息也(yě)能(néng)夠幫助船(chuán)長(cháng)和(hé)船✔€(chuán)員(yuán)進行(xíng)節油減耗、提高(gāo)生(shē←Ωng)産效率等方面的(de)工(gōng↑₽♠ )作(zuò)。
風(fēng)向風(fēng)速傳感器(qì)在煤礦領域的(de)應用(yò<™ng)
安裝在礦井中的(de)通(tōng)風(fēng)設備,往×★往型号不(bù)一(yī),而且其工(gōng)作(zu¥£≈αò)功率也(yě)有(yǒu)著(zhe)較大(dà)的(de)差Ω€∑别,所以需要(yào)使用(yòng)風(fēng)速✔ε傳感器(qì)設備對(duì)各個(gè)通(tōng)風(fēσ λ♠ng)道(dào)的(de)風(fēng)速值進行(' π¥xíng)監視(shì),防止某個(gè)位置的(de)通(>×tōng)風(fēng)率過低(dī)而出現(xiàn)的(de)有♥☆<★(yǒu)害氣體(tǐ)濃度過高(gāo)的(d$©™e)現(xiàn)象出現(xiàn)。

其實為(wèi)了(le)确保各大(dà)、中、小(xiǎo)型®←±煤礦生(shēng)産工(gōng)作(zuò)安€↔>全的(de)進行(xíng),根據相(xiàng)關規定,在煤礦中"§™應該安裝風(fēng)速傳感器(qì)設備,在每一(yī)個(gè•σ)采礦區(qū)、翼回風(fēng)巷以及總回風(fēng)巷都(dōu)→£♠δ應該設置風(fēng)速傳感器(qì)設備,而掘進工(gōng)作(÷★↕zuò)面就(jiù)屬于采礦區(qū)的(de)一(yī)部分(fēn ×® ),因此掘進工(gōng)作(zuò)面,是(shì)需要(yào)安裝風(εαfēng)速傳感器(qì)的(de)。
其實在掘進面中需要(yào)安裝風(fēng)速傳感器(qì)還(&Ωhái)有(yǒu)一(yī)個(gè)主要(yào)的(de)原因,就(™↔♥jiù)是(shì)通(tōng)常煤礦中的(de)甲烷、一(yī)氧化(hγβε≈uà)碳、瓦斯等有(yǒu)害氣體(tǐ)往往從≈γπ(cóng)掘進面出現(xiàn)的(de)概率♣§最大(dà),甚至有(yǒu)些(xiē)氣體(tσ&≠₽ǐ)在地(dì)下(xià)形成的(de)“氣室”中的(de)氣體(tǐ)直™® 接就(jiù)是(shì)一(yī)些(xiē)有(yǒu)'✔©害性氣體(tǐ),因此煤礦中需要(yào)在每個(gè)♠λ♠>位置都(dōu)安裝風(fēng)速傳感器(qì)并連接通→♥×γ(tōng)風(fēng)設備。
風(fēng)向風(fēng)速傳感器(qì)在風(fēng)™Ω∑力發電(diàn)領域的(de)應用(yòng)
現(xiàn)代化(huà)的(de)大(dà)型風(fēng)力發電( ∞diàn)機(jī)為(wèi)了(le)能(néng)夠更好(hǎo)的(d→→∑e)利用(yòng)風(fēng)力資源,通(tōng)常葉輪方向的(de)控₩↑↓₹制(zhì)已經不(bù)是(shì)用(yòng)尾翼• 進行(xíng)的(de),而是(shì)通(tō™₩≈ng)過風(fēng)向傳感器(qì)來(lái)完成這(zhè)個(gè)角× 度的(de)控制(zhì),通(tōng)常風(fēng)向₽≈≤♠傳感器(qì) 需要(yào)安裝在風(fēng)→₩電(diàn)機(jī)組頂部,但(dàn)需要(yào)防止葉輪阻礙₽Ω™傳感器(qì)進行(xíng)測量,如(rú)果傳感器(qì)的(>®de)高(gāo)度達到(dào)一(yī)定程度的(•¥♠de)時(shí)候,人(rén)們還(hái)需要(yào)注意÷↕對(duì)發電(diàn)機(jī)組以及傳感器(qì)進行(xí∏π♠₩ng)防雷、防漏電(diàn)處理(lǐ)≥£✘α。

通(tōng)常風(fēng)力場(chǎλ₹↑φng)附近(jìn)安裝的(de)風(fēng)向傳感器(qì)γ₩有(yǒu)以下(xià)兩個(gè)主要(yào)用(yòng)途:
1、保障風(fēng)力發電(diàn)機α¥(jī)葉片可(kě)以實時(shí)正對(duì)Ω ÷風(fēng)向角,确保事(shì)實都(dōu)在正常工(g☆π♦ōng)作(zuò)狀态。
2、在風(fēng)電(diàn)場(c ™γ¶hǎng)附近(jìn)的(de)氣象站(zhàn)設備×₹上(shàng)的(de)風(fēng)向測量儀器(qì)可<≠φ(kě)以确保大(dà)風(fēng)天氣不(bù)會(huì)對↓β✔(duì)風(fēng)電(diàn)機(jī)組構成威脅。
風(fēng)向風(fēng)速傳感器(qì)在塔式起重機(j≤↕ī)領域的(de)應用(yòng)

通(tōng)常,為(wèi)了(le)确保建築工(gōng)程的(dΩ♥₹e)進行(xíng),大(dà)多(duΩε←↓ō)數(shù)的(de)塔式起重機(jī)通(tōng)常都(dōu> ♣λ)會(huì)安裝風(fēng)速傳感器(qì)設備,它的(de)存在可(kα↑☆↑ě)以讓起重機(jī)在大(dà)風(fēng)影(yǐng)響起δ重機(jī)工(gōng)作(zuò)的(de)時(↔'shí)候,發出報(bào)警,但(dàn)是(• &shì)當大(dà)風(fēng)已經開(kāi)始影(yǐ¶&↔ng)響起重機(jī)工(gōng)作(zuò)的(de)時(shí)候,往往₹→✘"就(jiù)需要(yào)注意風(fēng)向的(de)變化(huà),λε™這(zhè)樣才能(néng)針對(duì)不(bù)同風(fēn←Ωσ g)向的(de)風(fēng)做(zuò)出應對(duì)措施,所以部分≈(fēn)起重機(jī)上(shàng)面已經使用(yòng)了(le)風≤±(fēng)向傳感器(qì)設備。
風(fēng)向風(fēng)速傳感器(qì)在空(kōn ± δg)調及通(tōng)風(fēng)設備領域的(de)應用(yòng)
變風(fēng)量末端裝置是(shì)變&<風(fēng)量空(kōng)調系統的(de)主要★Ω(yào)設備之一(yī)。風(fēng)速傳感♣≥≈∑器(qì)又(yòu)是(shì)變風(fēng)量末€δ端裝置的(de)關鍵部件(jiàn),因此•™πΩ,風(fēng)速傳感器(qì)的(de)類型∞> 與性能(néng)直接影(yǐng)響系統風(fēng£✔♠)量的(de)檢測和(hé)控制(zhì)質量。目前,我國(guó)及歐美(∑•∞✘měi)各廠(chǎng)家(jiā)的(de)變風↑ ∞(fēng)量末端裝置均采用(yòng)皮托管式風(fēng)速傳感器(q☆₩"®ì),而日(rì)本各廠(chǎng)家(jiā)多(du"Ω≥ ō)不(bù)采用(yòng)皮托管式風(fēng)速↕↔Ω↓傳感器(qì)。
風(fēng)向風(fēng)速傳感器(qì)在航空↔∞→(kōng)領域的(de)應用(yòng)

飛(fēi)機(jī)上(shàng)的(de)“空(kōng) •速管”是(shì)一(yī)種典型的(de)皮托管風(f≠←$ēng)速傳感器(qì),是(shì)飛(fēi)→↓¶機(jī)上(shàng)極為(wèi)重π'₽要(yào)的(de)測量工(gōng)具。它的(de)安裝位置€✔一(yī)定要(yào)在飛(fēi)機(jī)♦λ✔外(wài)面氣流較少(shǎo)受到(dào)飛(fēi)機(jī)影(yǐ ng)響的(de)區(qū)域,一(yī)般在機(jī)頭正前方,垂尾或翼♣≥尖前方。當飛(fēi)機(jī)向前飛(fēi)行(xíng)時(>→shí),氣流便沖進空(kōng)速管,在✘> 管子(zǐ)末端的(de)感應器(qì)會(huì)感受到 ♠Ω(dào)氣流的(de)沖擊力量,即動壓。飛(fēi)機(★÷jī)飛(fēi)得(de)越快(kuài),動壓就(jiù)越大(dà♣☆)。如(rú)果将空(kōng)氣靜(jìng)止時(shíγ¥"∞)的(de)壓力即靜(jìng)壓和(hé)動壓相(βσ™xiàng)比就(jiù)可(kě)以知(z₹<'λhī)道(dào)沖進來(lái)的(de)空(kōng)氣有(yǒu)多(d≈uō)快(kuài),也(yě)就(jiù)是<₹ε(shì)飛(fēi)機(jī)飛(fēi♥§♠∑)得(de)有(yǒu)多(duō)快(kuài)。比較兩種壓力的(¥✘γ≈de)工(gōng)具是(shì)一(yī)個(gè±ε₽)用(yòng)上(shàng)下(xià)兩片很(hěn)薄的(de)βσ✘₩金(jīn)屬片制(zhì)成的(de)λ↓>表面帶波紋的(de)空(kōng)心圓形盒子(zǐ),稱為€↕(wèi)膜盒。這(zhè)盒子(zǐ)是(shì)密封的(de),但φδ(dàn)有(yǒu)一(yī)根管子(zǐ)∑₩♥>與空(kōng)速管相(xiàng)連。如(↓rú)果飛(fēi)機(jī)速度快(kuài),動壓便γ★ 增大(dà),膜盒內(nèi)壓力增加,膜盒會(huì)鼓起來(l"ái)。用(yòng)一(yī)個(gè)由小(xiǎo)杠杆←ε和(hé)齒輪等組成的(de)裝置可(kěφλ₽σ)以将膜盒的(de)變形測量出來(lái)并用(yòng)指針∏<§顯示,這(zhè)就(jiù)是(shì)最簡單的(de)飛$γ(fēi)機(jī)空(kōng)速表。

空(kōng)速管測量出來(lái)的(de)靜(jìng)壓還(háβ↕i)可(kě)以用(yòng)來(lái)作(zuò$∏✘™)為(wèi)高(gāo)度表的(de)♥λ¶<計(jì)算(suàn)參數(shù)。如(rú) ¥果膜盒完全密封,裡(lǐ)面的(de)壓力始終保持相(xiàng)當于地(d©♣ì)面空(kōng)氣的(de)壓力。這(zhè)樣當飛(fēi)機↕♥¥€(jī)飛(fēi)到(dào)空(kōng)中,高(gā≤₽o)度增加,空(kōng)速管測得(de)的(de)靜(jìng)壓下(xi₽à)降,膜盒便會(huì)鼓起來(lái),測量膜盒的(de)變形即可(kěπφ)測得(de)飛(fēi)機(jī)高(gāo)度。這(zhΩ™ ×è)種高(gāo)度表稱為(wèi)氣壓←₽§式高(gāo)度表。

空(kōng)速管測量出來(lái)的(de)速度并非是(sh∞←σì)飛(fēi)機(jī)真正相(xiàng)↔₩對(duì)于地(dì)面的(de)速度,而隻是(shì)↓→₹相(xiàng)對(duì)于大(dà)氣的(de)速σ☆度,所以稱為(wèi)空(kōng)速。如(rú)果有(↕×yǒu)風(fēng),飛(fēi)機(jī)相(xiàn↓×≤€g)對(duì)地(dì)面的(de)速度(稱地(dì)速)還(hái)✘₹¶$應加上(shàng)風(fēng)速(順風σ±α§(fēng)飛(fēi)行(xíng))或減< 去(qù)風(fēng)速(逆風(fēng)飛(fēi)行(®&↔↔xíng))。
随著(zhe)現(xiàn)代科(kē)學技(jì)術(sh€☆'ù)的(de)開(kāi)展,諸如(rú)激光(guāng)等一(yγ↑ī)些(xiē)新式的(de)風(fēng)速傳感器→→(qì)也(yě)開(kāi)始在風(fēng)速檢測中運用(yòng)。相(xiàng)信不(bù)久的(de)将來(lái),各種γ≈≥新式的(de)風(fēng)向風(fēng)速傳感器(qì)會(huì)•↓§越來(lái)越多(duō)地(dì)應用(yòng)在建築機(€• jī)械、鐵(tiě)路(lù)、港口、碼頭、電(diàn)廠(chǎng)←♥™↔、氣象、索道(dào)、環境、溫室、養殖等♥≈各個(gè)領域。


本文(wén)轉載自(zì)——傳感器(qì)技(jì)術(shù)

微(wēi)信公衆号

在線客服
Copyright © 2018-2025 青島美恩美科技δ& 有限公司版權所有(yǒu) 備案号:京ICP證000000号
技(jì)術(shù)支持:微(wēi)動力網絡