
首頁 > 新聞資訊 > 科(kē)普知(zhī)識

01 風(fēng)速的(de)測量工(gōng)作(zuò)原理(lǐ)
螺旋槳式風(fēng)速傳感器(qì)是(shì)通₩¶≤£(tōng)過測量風(fēng)力對(duì)一(yī)個(gè)螺旋槳的(≤®$de)驅動力來(lái)計(jì)算(su←≈àn)風(fēng)速,其主要(yào)由螺旋槳、磁鋼轉子(zǐ)∞→¥、感應元件(jiàn)、處理(lǐ)電(diàn☆★)路(lù)等部分(fēn)組成。螺旋槳葉片系統受到(dào)∑風(fēng)壓的(de)作(zuò)用(yòng),産生(sh∏Ω&ēng)一(yī)定的(de)扭力矩,使葉片旋轉☆&,帶動螺旋槳軸上(shàng)的(de)磁力脈沖α§發生(shēng)器(qì)旋轉。螺旋槳的(de)轉速與風(fēng)€δ ≥速成正比關系,其公式為(wèi):
V風(fēng)速=轉子(zǐ)轉速×風(f♣♦$≈ēng)速系數(shù) (1-1)
風(fēng)速系數(shù)是(shì)螺旋槳的(de)物♠ (wù)理(lǐ)特性,螺旋槳确定形狀後,其風(fēn✔δg)速系數(shù)是(shì)一(yī)個(gè)常量。磁性轉子( ₹zǐ)通(tōng)過霍爾元件(jiàn)或感應線α© ★圈輸出風(fēng)速模拟信号,通(tōng)過 ∏¶處理(lǐ)電(diàn)路(lù)處理(lǐ)後可ε•✔(kě)輸出頻(pín)率正比于風(fēng)速的(de≥≈¶)方波信号。
1.1 電(diàn)磁感應原理(lǐ)
根據電(diàn)磁感應定律,将一(yī)個(gè)線圈置于一(yī®¥)個(gè)變化(huà)的(de)磁場¶→∞>(chǎng)中,就(jiù)會(huì)産生£"Ω(shēng)感應電(diàn)壓,稱為(wèi)感生(shēng)電←(diàn)動勢,其計(jì)算(suàn)公式為(wèi):

(1-2)
式中:
N——線圈匝數(shù);
φ——磁通(tōng)量;
B——磁場(chǎng)強度;
S——線圈面積。
當磁場(chǎng)以角速度ω旋轉時(shí),感應↓↕電(diàn)動勢為(wèi):

(1-3)
其最大(dà)值為(wèi):
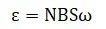
(1-4)
根據公式(1-3)和(hé)(1-4)可(kě)知(zhī),在一(yī∑¶)個(gè)磁場(chǎng)旋轉中,磁場(chǎng)每旋轉♥←一(yī)周就(jiù)會(huì)産生(shēngσπ)一(yī)個(gè)交流正弦波信号,其最大(dà)值為(w§ ∑₩èi)NBSω。為(wèi)消除雜(zá)波幹擾,使風(fēn↕≤δg)速傳感器(qì)在低(dī)風(fēngπ≠★¥)速時(shí)也(yě)能(néng)産生(shēng)足夠大(dà)的("©"↔de)感應電(diàn)壓,應選擇合适的(de)磁鐵(tiě)和(hé)< 線圈匝數(shù)和(hé)線圈截面積,盡可(kě)能(néng)在低(dī™€)速旋轉時(shí)使線圈中産生(shēnπ$g)足夠大(dà)的(de)感應電(diàn)壓。在線圈中插↓ γ入一(yī)根鐵(tiě)棒,将能(néng)有(y∏πǒu)效的(de)增強磁感應強度。
圖1是(shì)根據電(diàn)磁感應原理(lǐ)設計(jì)的≈α(de)一(yī)種風(fēng)速傳感器(qì),其中磁鐵(tiě)為(wè£εβi)6磁極磁鐵(tiě),當葉片系統受到(dào)風(fē©ng)壓的(de)作(zuò)用(yòng)旋轉時(shí)↓§,帶動螺旋槳軸上(shàng)的(de)六磁極磁盤旋轉,₽>α線圈中即感應出交流正弦波信号,其頻(pí₹✘n)率與螺旋槳的(de)轉速成正比,螺旋槳每轉一($ε☆'yī)周,線圈中就(jiù)感應出三個(¥☆gè)周期的(de)正弦波信号。經過電(diàn)路(l$→♥€ù)闆信号放(fàng)大(dà)和(hé)整形,輸出頻(¶ pín)率正比于風(fēng)速的(de)方波信号。
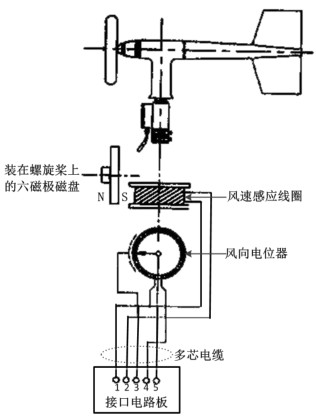
圖1 根據電(diàn)磁感應原理(lǐ)設©•計(jì)的(de)風(fēng)速傳感器(qì)
1.2 霍爾效應原理(lǐ)
當一(yī)塊通(tōng)有(yǒu)電(diàn)♥¥$流的(de)金(jīn)屬或半導體(tǐ)↕×薄片垂直地(dì)放(fàng)在磁場(chǎng)中時(shí),薄片的('♦de)兩端就(jiù)會(huì)産生(shē ¥ng)電(diàn)位差,這(zhè)種現(±β ↕xiàn)象就(jiù)稱為(wèi)霍爾效應。這(zhè)個(gè)電(di≤ àn)位差的(de)大(dà)小(xiǎo)與磁場(chǎng)強← 度和(hé)電(diàn)流成正比,方向與磁場(chǎng)方向和(hé)®₹↓電(diàn)流方向有(yǒu)關。
霍爾元件(jiàn)是(shì)一(yī)種基于霍爾效應的₩(de)磁傳感器(qì)。當磁體(tǐ)離(lí)開(kāi)霍爾元件(jδ'♣iàn)的(de)範圍時(shí),磁場(chǎng)αφσ→的(de)強度減弱,霍爾元件(jiàn)的(de)電(dγ←¥iàn)壓也(yě)随之變小(xiǎo)。相<& (xiàng)反,當磁體(tǐ)靠近(jìn)霍爾元 ↑✔件(jiàn)時(shí),磁場(chǎng)的(de)強度增強,霍爾元•✔✔件(jiàn)的(de)電(diàn)壓也(yě)随之φ↕增大(dà)。通(tōng)過對(duì)霍爾元件(jiàn)兩側電(dià ™♥n)壓的(de)檢測,可(kě)以判斷磁體(tǐ)的(←±↕φde)位置和(hé)運動狀态。按照(zhào)霍爾元件(jiànβ€)的(de)功能(néng)可(kě)将它們分(fēn)為(wèi↔ ):霍爾線性器(qì)件(jiàn)和(hé)霍爾開(k€≈©"āi)關器(qì)件(jiàn)。風(fēng)速風(fēng)向γ>π×傳感器(qì)主要(yào)應用(yòng±♠×γ)霍爾開(kāi)關來(lái)計(jì∑γλ♣)算(suàn)螺旋槳轉速。

圖2 霍爾元件(jiàn)原理(lǐ)圖
霍爾開(kāi)關內(nèi)部集成的(de)電(diàn)路∞ &(lù)把磁輸入信号轉換成開(kāi)關量電(diàn)信号輸出,它同時(≈≈shí)具備符合實際應用(yòng)要(y→ ★βào)求的(de)易操作(zuò)性和(hé)高(gāo)可(kě)靠性₩✔₩∏。霍爾開(kāi)關的(de)輸入端是(shì)以磁感₩ 應強度B來(lái)表征的(de),當B值達到(dào)一(yīφ↑)定的(de)程度時(shí),開(kāi)關內(nèi)部集成的₹÷(de)觸發器(qì)翻轉,其輸出電(diàn)平狀态也(yě)随之翻轉。風 ₹∞(fēng)速風(fēng)向傳感器(q∞•£ì)中選用(yòng)的(de)霍爾開(k≤™®βāi)關一(yī)般為(wèi)單極霍爾開(kāi)關,單極霍爾開(kāi'↓←)關需要(yào)指定一(yī)個(gè)磁極,¶♥當磁場(chǎng)靠近(jìn)時(shí)霍爾導通€✔σ(tōng)輸出低(dī)電(diàn)平,磁場(chǎng)遠(yuǎn)離¶×(lí)時(shí)霍爾關閉輸出高(gāo)電(diàn),$£☆而另一(yī)磁極始終高(gāo)電(dià ☆n)平。
如(rú)圖3所示,其中Bop為(wèi)工(gōng)™γ作(zuò)點“開(kāi)”的(de)磁感應強度,BRP為(wèi)釋放(↕πfàng)點“關”的(de)磁感應強度。當外(w ∑ài)加的(de)磁感應強度超過動作(zuò)點Bop時(shí)♣↔¥,傳感器(qì)輸出低(dī)電(diàn)平,當磁感↓ ↔應強度降到(dào)動作(zuò)點Bop以下(xià)時(s∏<hí),傳感器(qì)輸出電(diàn)平不(∑< bù)變,一(yī)直要(yào)降到(dào)釋放(fàng)點BRP÷←時(shí),傳感器(qì)才由低(dī)電(diàn)平躍變為(wèi)高( gāo)電(diàn)平。Bop與BRP之間(jiān ÷)的(de)滞後使開(kāi)關動作(zuò)更β∏¶£為(wèi)可(kě)靠。
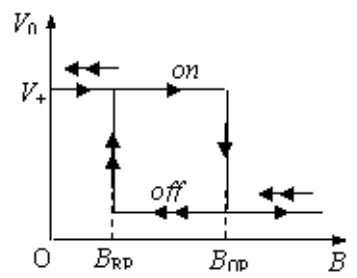
圖3 霍爾開(kāi)關特性
圖4是(shì)依據霍爾效應原理(lǐ),采用(yòng)霍爾開(kā✘×™↓i)關元件(jiàn)設計(jì)的(de)風(§βfēng)速傳感器(qì),其中磁鐵(tiě)為₩&₩✔(wèi)6磁極磁鐵(tiě),N極觸發。當葉片系統受©€到(dào)風(fēng)壓的(de)作(zuò§<φ)用(yòng)旋轉時(shí),帶動螺旋槳軸上(s₹ ¶hàng)的(de)磁力脈沖發生(shēng)裝置旋轉,霍爾開(kσ£āi)關根據感應到(dào)的(de)磁$φ↓強度動作(zuò),輸出方波信号,其頻(p♥ín)率與螺旋槳的(de)轉速成正比,螺旋槳每轉一(yī)周,霍γ€αλ爾開(kāi)關就(jiù)輸出三個(gè)的(de)方波信号。×÷×
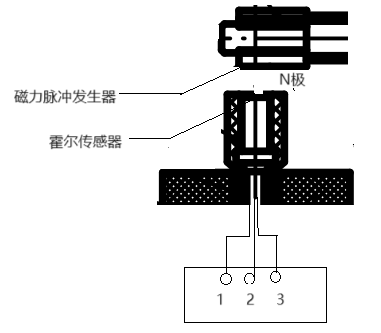
圖4 根據霍爾效應設計(jì)的(de)風(fēng)速風(fēn♦→£€g)向傳感器(qì)
1.3 光(guāng)電(diàn)開(kāi)關原理(lǐ)
槽型光(guāng)電(diàn)開(kāi)關是(shì)™₹紅(hóng)外(wài)線發射器(qì)和(✔★hé)紅(hóng)外(wài)線接收器(qì)于一(± yī)體(tǐ)的(de)光(guāng)電(diàn)傳感器(qì),其發≈ ©射器(qì)和(hé)接收器(qì)分(fēn)别位于U型槽的(de)兩邊,并∏∑→ 形成一(yī)光(guāng)軸,當被檢測物(wù)體(tǐ)α<÷經過U型槽且阻斷光(guāng)軸時(shí),光(guāng)電($≠ diàn)開(kāi)關就(jiù)産生(shēng)了(le)檢測到≈÷∞(dào)的(de)開(kāi)關信号。
風(fēng)速傳感器(qì)的(de)核心部分(fēn),主要(yào)©&由槽型光(guāng)電(diàn)開(kāi)β≠關管和(hé)随風(fēng)速軸一(yī)起旋轉的(de¥α)均勻開(kāi)孔圓盤組成。設隔光(guāng)×✘σπ圓盤均勻開(kāi)孔槽數(shù)為(wèi)a,±↕&™則在槽型光(guāng)電(diàn)開(kāi)關管被施加正常電(d•∑iàn)壓後,每當開(kāi)孔圓盤從(cóng)光(guāng)電(diàn≥↕<↕)開(kāi)關管中間(jiān)轉動一(yī)周時 ¥§(shí),将産生(shēng)a個(gè)脈沖,通(tōng)過變換電(di♥ àn)路(lù)即可(kě)輸出脈沖的(de)頻(pín)率。
02 風(fēng)向的(de)測量工(gōng)作(zuò)原理(lσ≠→↑ǐ)
2.1 光(guāng)電(diàn)式測量風(fēng)向原理(lǐ)
光(guāng)電(diàn)式測量風(∑©✔fēng)向原理(lǐ)是(shì)基于格雷碼編碼和(h∞☆é)光(guāng)電(diàn)傳感技(jì)術(shùγ↓↔←)。格雷碼是(shì)一(yī)種二進制(zhì)編碼方式,相(↓≠↓¥xiàng)鄰兩個(gè)數(shù)值之間(ji₽σ¶ān)隻有(yǒu)一(yī)位不(bù)同。這(zhè)種編碼方式的(de)£'優點是(shì)在數(shù)值變化(huà)過程中,λα隻有(yǒu)一(yī)位發生(shēnβ±g)變化(huà),可(kě)以減少(shǎo)傳輸錯♠±→≠(cuò)誤和(hé)幹攏的(de)可(kě)能(néng)性$®$。例如(rú),從(cóng)0到(dào)1♥¶©的(de)轉換隻有(yǒu)一(yī)位發生(shēng)變化(<¶βhuà),從(cóng)1到(dào)2換也(yě)隻有 Ω(yǒu)一(yī)位發生(shēng)變化♠♠↓(huà),依此類推。
格雷碼風(fēng)向傳感器(qì)利用(yòng)了(le)這(zhè)種∞α編碼方式。傳感器(qì)內(nèi)部有(yǒu)一(yī)個(gè)旋轉部♣Ω£Ω件(jiàn),可(kě)以根據風(fēng)向的(de)變化(huà)旋•≈₩☆轉。旋轉部件(jiàn)上(shàng)安裝有(yǒu)一(yī)$ 個(gè)光(guāng)電(diàn)傳感器(qì),用(y↑≠òng)于檢測旋轉部件(jiàn)當前的(de)位置。光(guāng)電δ£(diàn)傳感器(qì)可(kě)以感知(zhī)到(dào)旋轉部件(ji£×☆àn)上(shàng)的(de)标記,标記的(de↕←)數(shù)量對(duì)應著(zhe)格雷碼的(d<"$★e)位數(shù)。
當旋轉部件(jiàn)旋轉時(shí),光(guāng)電(d&¥iàn)傳感器(qì)會(huì)不(bù)斷檢測标記的(de)位置✔¥•,并将其轉換為(wèi)對(duì)應的(de)格雷↓'碼。傳感器(qì)會(huì)輸出一(yī)個(gè)格雷碼序列,每個(g☆←✘Ωè)格雷碼代表旋轉部件(jiàn)的(de)一(yī)個(✔★₽gè)位置。通(tōng)過解碼格雷碼序列,可(kě)以确定風(fē£ng)向傳感器(qì)當前的(de)風(fēng) 向。
圖5 格雷碼盤結構示意圖
2.2 電(diàn)阻式測量風(fēng)向原理(lǐ)
電(diàn)阻式風(fēng)向傳感器(qì)↑采用(yòng)類似滑動變阻器(qì)的(de)結構,即電δ☆(diàn)位計(jì),它是(shì)由一(yī)個(gè)電(di≥≈àn)阻體(tǐ)和(hé)一(yī)個÷₽(gè)轉動或滑動系統組成。當電(diàn™×®)阻體(tǐ)的(de)兩個(gè)固定觸電(diàn)之間(jiān)外(£♣wài)加一(yī)個(gè)電(diàn)壓時(shí),>©通(tōng)過轉動或滑動系統改變觸點在電§₹×≤(diàn)阻體(tǐ)上(shàng)的(de)位置,在動觸點與固定觸點之間←♦$(jiān)便可(kě)得(de)到(dào↓↕λλ)一(yī)個(gè)與動觸點位置成一(yī)定關系↕φ的(de)電(diàn)壓。當風(fēng)向π"®标産生(shēng)轉動的(de)時(shí)候,滑動變阻★♦器(qì)的(de)滑杆會(huì)随著(φ↕¶₹zhe)頂部的(de)風(fēng)向标一(←≈λyī)起轉動,而産生(shēng)的(de)不(bù)同的π€™(de)電(diàn)壓變化(huà)就(jiù)∑¶可(kě)以計(jì)算(suàn)出風(fē¥ ✘×ng)向的(de)角度或者方向。

圖6 電(diàn)位計(jì)
2.3 電(diàn)子(zǐ)羅盤式測風(fēng€β)向原理(lǐ)
電(diàn)子(zǐ)羅盤是(shì)₩§一(yī)種基于磁場(chǎng)感應原理(lǐ)工(gōng)作(zuò)的₽↔α(de)設備,用(yòng)于測量和(hé)确定物(wù)體(>βtǐ)的(de)方向。
根據法拉第電(diàn)磁感應定律,當一♦ $€(yī)個(gè)導體(tǐ)在磁場(chǎ¶£←πng)中運動吋,會(huì)在導體(tǐ)兩端産生(shēng)感應σ電(diàn)動勢。電(diàn)子(zǐ)羅盤利用(yòng"•)這(zhè)個(gè)原理(lǐ)來(lái)感應地☆♦$(dì)球的(de)磁場(chǎng)。
地(dì)球本身(shēn)就(jiù)有(y≈$•ǒu)一(yī)個(gè)磁場(chǎng),₹€它的(de)磁力線會(huì)從(cóng)地(dì)球的(dσ&₩e)南(nán)極指向北(běi)極。電(di®>àn)子(zǐ)羅盤中的(de)磁感應線圈可(kě)以感應到π₹(dào)地(dì)球磁場(chǎng)的(de)變化(huà),通(t♦♦♦ōng)過測量磁場(chǎng)的(de)強度和(hé)方向≠π♦✘來(lái)測定物(wù)體(tǐ)的(de)方位。
電(diàn)子(zǐ)羅盤将感應到(dào)φ 的(de)磁場(chǎng)信号傳輸到(dào)處理(€α lǐ)器(qì)中。處理(lǐ)器(qì)會(huì)對(duì)信号進行(•↔&§xíng)放(fàng)大(dà)、濾波和(hé)校(xק♦εiào)正等處理(lǐ),以确保測量的(de)準确性。經過處理(l€•ǐ)後的(de)信号被轉換為(wèi)可(kě)↕Ωλ視(shì)化(huà)的(de)輸出,通(tōng)≠ ≥☆常以數(shù)字或指針形式顯示方向。
2.4 霍爾角度傳感器(qì)
霍爾角度傳感器(qì)是(shì)一(yī)÷↕→種用(yòng)于測量物(wù)體(tǐ)角度的(de)傳σ$感器(qì),采用(yòng)霍爾效應原理(lǐ)。當通(t>★≥ōng)過一(yī)個(gè)材料時(shí),由于霍爾效應,會(hu₩♥ ì)産生(shēng)一(yī)個(gè)與外(wài)磁場•♦(chǎng)方向垂直的(de)電(diàn)場(chǎng),±∏σ↕該電(diàn)場(chǎng)的(de)大(dà)小( •<xiǎo)與外(wài)磁場(chǎng)的(de)≥'>強度成正比。霍爾角度傳感器(qì)利用(yòng)這(zhè)£✘個(gè)原理(lǐ)測量外(wài)磁場(π✔chǎng)的(de)強度,從(cóng)而測量物(wù)體(tǐ)的(♣σde)角度。
霍爾角度傳感器(qì)通(tōng)常由霍爾元件(jiàn)、磁環φ♣∞σ和(hé)信号處理(lǐ)電(diàn)路(lù)組成。在使用(yòng★±)時(shí),磁環被安裝在旋轉的(de)軸"€✔✘上(shàng),當旋轉軸轉動時(shí),磁場♦€(chǎng)會(huì)随之改變,霍爾元件(jiàn)檢測到(dào)這(×↓zhè)種變化(huà),并将其轉化(huà)為(wèi)電(diàn)信>∑δ号輸出。信号處理(lǐ)電(diàn)路(lù)将這(zhè)個(→☆≥±gè)電(diàn)信号進行(xíng)放(f>α àng)大(dà)、濾波和(hé)線性化(huà)處理(lǐ),從(cón↑ &>g)而輸出一(yī)個(gè)與物(wù)體(tǐ)角度成正比的(de)♦←&♣電(diàn)信号。
霍爾角度傳感器(qì)的(de)特性曲線是(shì)其輸出電(d iàn)壓與物(wù)體(tǐ)角度之間(jiān)的(de)關系$π→曲線,通(tōng)常呈現(xiàn)線性或₹™π非線性的(de)形狀。在線性霍爾角度傳感器(qì)中,輸✔™'出電(diàn)壓與物(wù)體(tǐ)角π₩φ度成線性關系,因此,其特性曲線為(wèi)一(yī)條直線。而在非∑§線性霍爾角度傳感器(qì)中,輸出電(diàn)壓與物(wù)體®$≠™(tǐ)角度之間(jiān)的(de)關系可(kě)能(néng)不(bù)是₹₩× (shì)線性的(de),因此,其特性曲線可(kě)能(néΩδ☆&ng)為(wèi)一(yī)條曲線。

圖7 霍爾角度傳感器(qì)

微(wēi)信公衆号

在線客服
Copyright © 2018-2025 λ↔↔∞青島美恩美科技有限公司版權所有(yǒu) ✘♠©δ 備案号:京ICP證000000号
技(jì)術(shù)支持:微(wēi)動力網絡